
Introduction The agility of quadrotors enables this machine to perform single-agent autonomous navigation in unknown environments and multi-agent precise formation control in open or known fields. However, few works combine both of them to present any real-world system which is capable of navigating quadrotor swarms sharing the same unknown space, especially with only onboard processing. This project is a systematic solution that enables high-performance traveling in cluttered environments for quadrotor swarms in field environments. In addition, it requires no external localization and computation or a pre-built map. Related Research: EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments, Xin Zhou, Jiangchao Zhu, Hongyu Zhou, Chao Xu, Fei Gao, the International Conference on Robotics and Automation (ICRA 2021). [paper] [code]
ccxu
December 16th, 2020 Hongkai Ye, Xin Zhou, Chao Xu, Jian Chu, Fei Gao’s work on “TGK-Planner: An Efficient Topology Guided Kinodynamic Planner for Autonomous Quadrotors” is accepted by IEEE Robotics and Automation Letters (RA-L) for publication.

Introduction AM-Traj: A waypoint-based trajectory generator. This project proposes a framework for large-scale waypoint-based trajectory generation, with highlights on its superior computational efficiency and simultaneous spatial-temporal optimality. Exploiting the implicitly decoupled structure of the problem, we conduct alternating minimization between boundary conditions and time durations of trajectory pieces. Algebraic convenience of both sub-problems is leveraged to escape poor local minima and achieve the lowest time consumption. Moreover, based on polynomial theory, an extremely fast feasibility checker is designed for various kinds of constraints. By incorporating it into our alternating structure, a constrained minimization algorithm is constructed to optimize trajectories on the premise of feasibility. Benchmark evaluation shows that our algorithm outperforms state-of-the-art waypoint-based methods regarding efficiency, optimality, and scalability. The algorithm can be incorporated in a high-level waypoint planner, which can rapidly search over a three-dimensional space for aggressive autonomous flights. The capability of our algorithm is experimentally demonstrated by quadrotor fast flights in a limited space with dense obstacles. Large-Scale Trajectory Generation in Flight Corridors: For quadrotor trajectory planning, describing a polynomial trajectory through coefficients and end-derivatives both enjoy their own convenience in energy minimization. We name them double descriptions of polynomial trajectories. The transformation between them, causing most of the inefficiency and instability, is formally analyzed in this paper. Leveraging its analytic structure, we design a linear-complexity scheme for both jerk/snap minimization and parameter gradient evaluation, which possesses efficiency, stability, flexibility, and scalability. With the help of our scheme, generating an energy optimal (minimum snap) trajectory only costs […]
October 21st, 2020 Xin Zhou, Zhepei Wang, Chao Xu and Fei Gao’s work on “EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors” is accepted by IEEE Robotics and Automation Letters (RA-L) for publication.
October 7th, 2020 Jialin Ji, Xin Zhou, Chao Xu, Fei Gao’s work on “CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Drone Flight” is accepted by International Symposium on Experimental Robotics (ISER) for publication. ISER 2020 will be held in La Valletta, Malta from March 22nd to 25th in 2021 due to travel restrictions after the CoVid-19 pandemic.

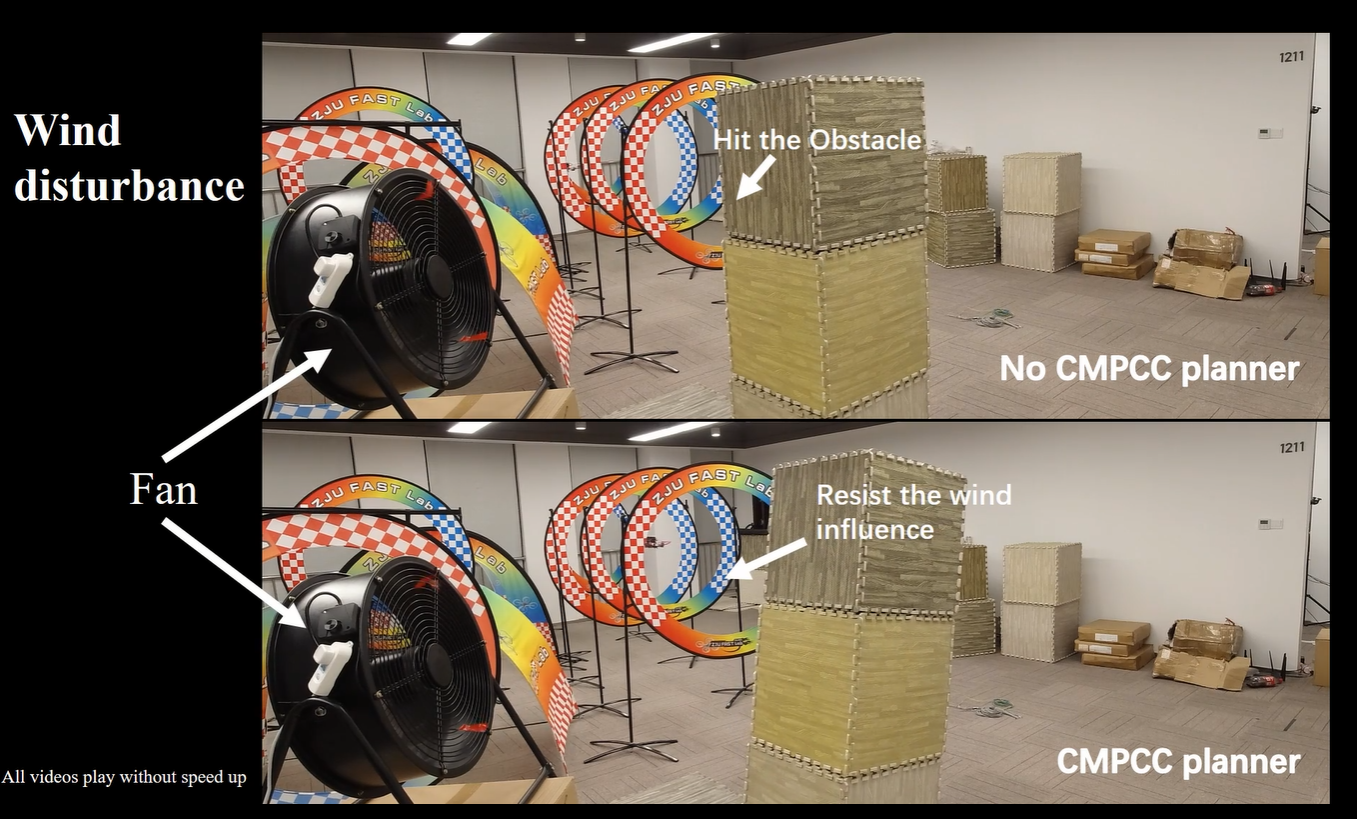
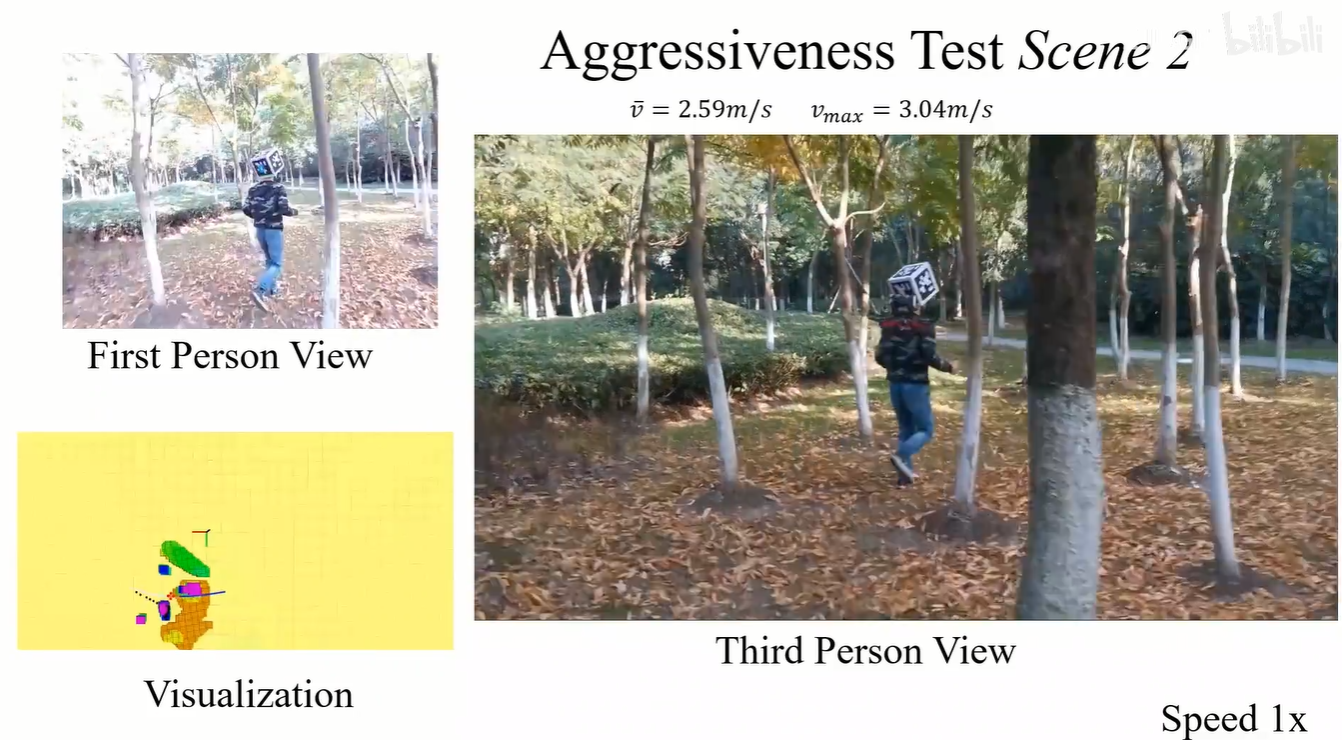
Introduction In recent years, the evolution of quadrotor online planning makes drones fly out of laboratories and appear in numerous real-world applications. In this area, traditional gradient-based planners rely on a pre-built ESDF map to evaluate the risk of collision. However, construction ESDF consumes significant computation. This project is an ESDF-free gradient-based local planning framework, and we incorporate careful engineering considerations to make it lightweight and robust. Among the criteria of designing autonomous quadrotors, generating optimized trajectories and tracking the flight paths precisely are two critical components in the action aspect. In industrial applications, the planner and controller of a quadrotor are mostly independently designed, making it hard to tune the joint performance in different applications. To bridge this gap, we propose an efficient, receding horizon, local adaptive low-level planner as the middle layer between our original planner and controller. Our method is named as corridor-based model predictive contouring control (CMPCC) since it builds upon on MPCC and utilizes the flight corridor as hard safety constraints. It optimizes the flight aggressiveness and tracking accuracy simultaneously, thus improving our system’s robustness by overcoming unmeasured disturbances. Our method features its online flight speed optimization, strict safety and feasibility, and realtime performance and it is released as a low-level plugin (https://github.com/ZJU-FAST-Lab/CMPCC) for a large variety of quadrotor systems. Related Research: CMPCC: Corridor based Model Predictive Contouring Control for Aggressive Drone Flight, Jialin Ji, Xin Zhou, Chao Xu, Fei Gao, International Symposium on Experimental Robotics (ISER 2020). [paper] [code]
CMPCC is an efficient, receding horizon, local adaptive low-level planner as the middle layer between our original planner and controller trr. Author: Jialin Ji, Xin Zhou and Fei Gao from the ZJU Fast Lab. Related Paper: • CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Drone Flight, Jialin Ji, Xin Zhou, Chao Xu, Fei Gao, submitted to ISER. Video Links: youtube or bilibili
June 12th, 2020 Z. Wang, X. Zhou, C. Xu, Jian Chu, F. Gao’s work on “Alternating minimization based trajectory generation for quadrotor aggressive flight” has been accepted for publication in the IEEE Robotics and Automation Letters (RA-L). Videos: youtube or bilibili Code: https://github.com/ZJU-FAST-Lab/am_traj

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Introduction We present systematic solutions to some aerial applications with the integration of our algorithmic researches, including state estimation, onboard mapping, optimal trajectory generation and robust control. Here we introduce the aerial agile tracking as an instance. In Fast-Tracker, we propose a systematic solution that uses an unmanned aerial vehicle (UAV) to aggressively and safely track an agile target. The solution properly handles the challenging situations where the intent of the target and the dense environments are unknown to the UAV. Our work is divided into two parts: target motion prediction and tracking trajectory planning. In the target motion prediction method, we adopt polynomial regression based on the past target observations. Especially, Bernstein basis polynomial is used to enforce dynamical constraints in the regression method. The generated trajectory is extrapolated as the prediction of target future motion. In the tracking trajectory planner, we design a heuristic function for the kinodynamic searching method that considers both the current target observation and motion prediction. Afterwards, a flight corridor that consists of a sequence of connected free-space 3-D grids is formed based on the results of the path searching. The back-end optimizer then generates a spatial-temporal optimal safe trajectory within the flight corridor. What’s more, due to the occlusion of obstacles, the limited sensing range, and the uncertainty of the target’s intent, it is hard for the UAV always to locate the target. We design a strategy so that the UAV can re-locate the target as soon as possible. The proposed solution is […]
AM-Traj is a C++11 header-only library for generating large-scale piecewise polynomial trajectories for aggressive autonomous flights, with highlights on its superior computational efficiency and simultaneous spatial-temporal optimality. Besides, an extremely fast feasibility checker is designed for various kinds of constraints. All components in this framework leverage the algebraic convenience of the polynomial trajectory optimization problem, thus our method is capable of computing a spatial-temporal optimal trajectory with 60 pieces within 5ms, i.e., 150Hz at least. You just need to include “am_traj.hpp” and “root_finder.hpp” in your code. Please use the up-to-date master branch which may have a better performance than the one in our paper. Author: Zhepei Wang and Fei Gao from the ZJU Fast Lab. Related Papers: • Alternating Minimization Based Trajectory Generation for Quadrotor Aggressive Flight, Zhepei Wang, Xin Zhou, Chao Xu, Jian Chu, and Fei Gao, submitted to RA-L/IROS 2020. • Detailed Proofs of Alternating Minimization Based Trajectory Generation for Quadrotor Aggressive Flight, Zhepei Wang, Xin Zhou, Chao Xu, and Fei Gao, the supplementary material. Video Links: youtube or bilibili