
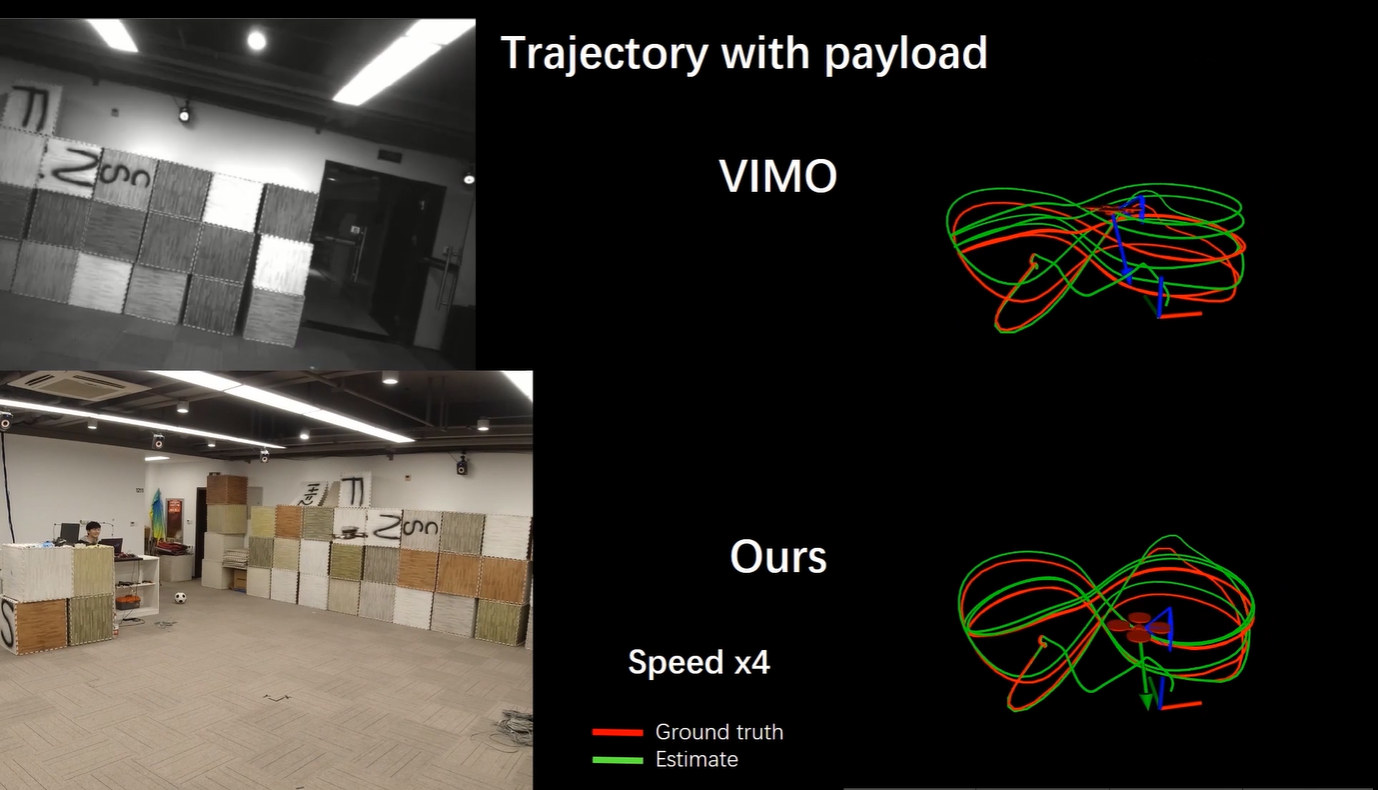
Introduction Visual odometry has made tremendous progress since Mars Exploration Rovers was exploited, but studies focus less on the platform itself. In order to make the state estimation better applied, we focus on details about the dynamical modeling of quadrotors and propose to make the most of all kinds of sensory data to acquire all states of any quadrotor platform. In the series of work, the identification of quadrotor dynamical system is prime, which is between Newton-Euler dynamics and rotor rpm and motor current. Then, an all-states estimator is designed to fuse different kinds of sensors, which leads to more accurate pose estimation and addictive generalized external force estimation without losing real-time and robustness. Related Research: VID-Fusion: Robust Visual-Inertial-Dynamics Odometry for Accurate External Force Estimation, Ziming Ding, Tiankai Yang, Kunyi Zhang, Chao Xu, Fei Gao, the International Conference on Robotics and Automation (ICRA 2021). [paper]
ccxu

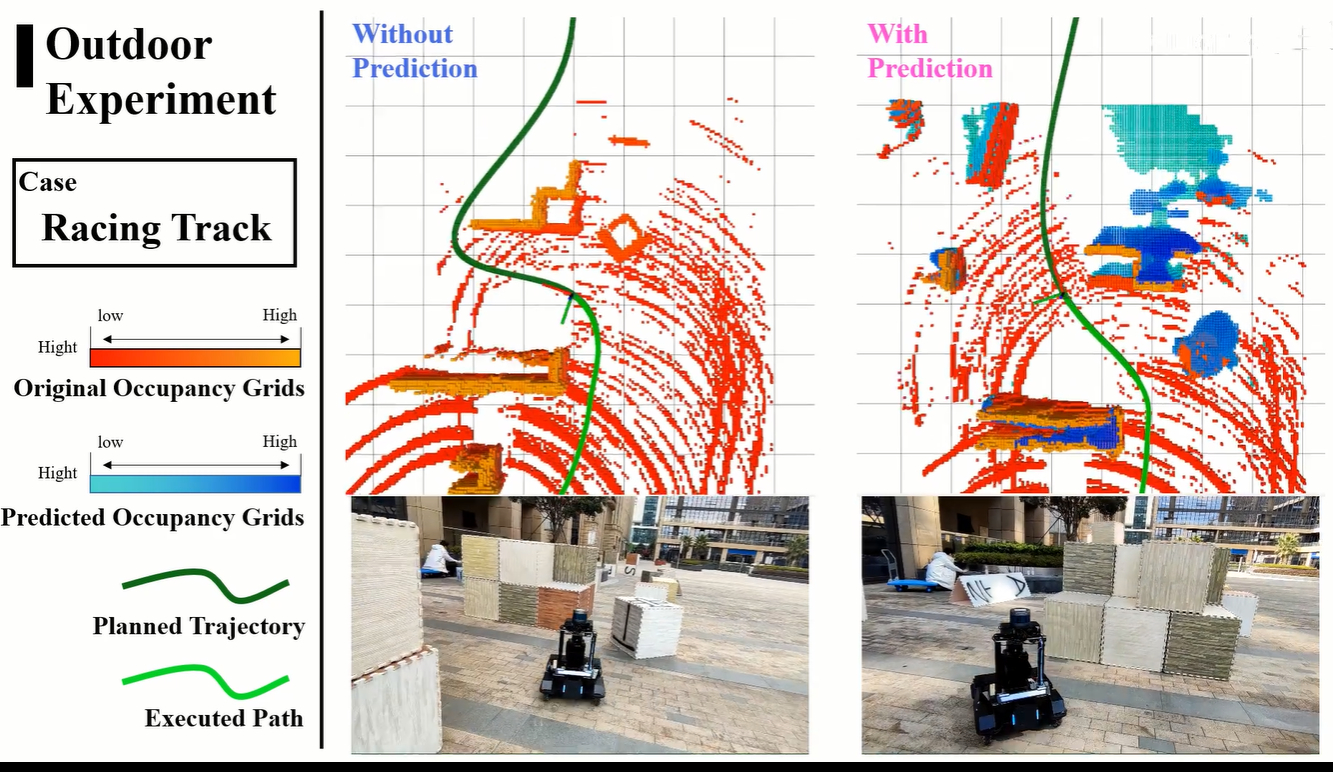
Introduction Deep learning and reinforcement learning are bringing changes into robotics. In IARC challenge, we designed a hierarchical decision and control for a continuous multi-target problem: policy evaluation with action delay. We further proposed Time-in-Action reinforcement learning, mapping the state-action pair to the time accomplishing the action by its underlying controller. We also used fusing raw fisheye image and attitude data to detect and locate objects in a 3D environment with a deep neural network. Recently we utilized the deep learning method to leverage the performance of robotic navigation. We used the self-supervised learning method to complete obscured parts of obstacles and combine this map prediction during planning to accomplish fast and safe navigation. We are looking forward to learning biased sampling in trajectory planning. We are also interested in model-based reinforcement learning, as well as learning-based low-level controllers and learning-based state estimation. Video

Introduction ZMART is the abbreviation for the Zhejiang University Micro-Aerial Robotics Team, majorly for the International Aerial Robotics Competition in the Asia-Pacific Venue. ZMART won the Best System Design Award (2015 in Beihang University) and the First Prize Award (2016&2017 in Beihang University). On August 27, 2018, assessed by the international Aerial Robot Competition (IARC) committee, ZMART won champion of mission 7 of IARC and won the prize of US $20000. Zhejiang University became the seventh world champion of IARC after Stanford University (1995), Carnegie Mellon University (1997), Berlin University of Technology (2000), Georgia Institute of Technology (2008), Massachusetts Institute of Technology (2009) and Tsinghua University (2013). More information please refer to the link. In 2018, the 11th WRSC and IRSC was held in Sounthampton, UK. As first time participants, our team ZMART won the 3rd place of WRSC 2018 Micro-sailiboat class. In 2019, the 12th WRSC and IRSC was held in Ningbo, China. Our team ZMART won the 1st place of WRSC 2019. In the same year, ZMART won the 2nd place of DJI RoboMaster AI Challenge, with $15,000 prize. Award Research Area Dynamics and Control: Design and Modelling, Disturbance Control, Trajectory Generation, Formation Environment Sensing: Computer Vision, Machine Learning, Detection and Tracking, Visual Odometry, SLAM Artificial Intelligence: Reinforcement Learning, Deep Learning, Human in the Loop, Situation Awareness ZMART featured in media 2016: http://47.243.9.220/zmart-featured-in-media/ ZMART Performance video 2016: 2016 IARC Official Results 2016: 2016 IARC Performance Collection – ZMART 2017: ZMART 2017 Trailer – We need you

December 17th, 2020 Our recent work “EGO-Swarm” is reported by Science. EGO-Swarm is a decentralized and asynchronous systematic solution for multi-robot autonomous navigation in unknown obstacle-rich scenes using merely onboard resources. Author: Xin Zhou, Jiangchao Zhu, Hongyu Zhou, Chao Xu, and Fei Gao from the ZJU Fast Lab. Related Paper: EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments (Submitted to ICRA2021). [Preprint] Video Links: YouTube, bilibili (for Mainland China)
The International Aerial Robotics Competition (IARC) Official Website : http://www.aerialroboticscompetition.org/stories/stories7.php (2016 IARC Technology Readiness Level). Quota from the last sentence: The team demonstrating this level of performance in 2016 was Zhejiang University. Other rankings and scores don’t matter. Zhejiang University has currently set the performance level for all IARC teams to beat in 2017. Zhejiang University News(浙江大学新闻办): http://www.news.zju.edu.cn/news.php?id=43711 Zhejiang Channel of the Xinhuanet(新华网浙江频道): http://www.zj.xinhuanet.com/zjEdu/20161010/3476997_c.html Zhejiang Online(浙江在线-浙江日报): http://edu.zjol.com.cn/system/2016/10/10/021325441.shtml
2018年8月27日,经国际空中机器人大赛(IARC)委员会评定,浙江大学代表队ZMART以综合评分第一、比赛成绩第一,获得IARC第七代任务世界冠军,赢得2万美元比赛奖金。浙江大学成为继斯坦福大学(1995),卡耐基梅隆大学(1997),柏林工大(2000),佐治亚理工(2008),麻省理工(2009),清华大学(2013)之后IARC第七个世界冠军得主。自此第七代任务结束,IARC比赛进入第八代任务。 News featured in the media include: 电视频道报道:国际空中机器人(IARC)大赛及青少年附加赛在中国教育电视台-1 频道播出,Youku链接 College of Control Science & Engineering, Zhejiang University, “历时5年,浙大队ZMART勇夺国际空中机器人大赛世界冠军,终结第七代任务“ China Automation Association (中国自动化学会), “【2018 IARC】国际空中机器人大赛将于8月26日在北京航空航天大学体育馆开幕!大赛背景介绍与参赛队伍简介一睹为快!“ 国际空中机器人微信大赛公众号/搜狐网,“2018年国际空中机器人大赛在北京成功举办” INTERNATIONAL AERIAL ROBOTICS COMPETITION Mission 7 (2014-2018), http://www.aerialroboticscompetition.org/mission7.php THE INTERNATIONAL AERIAL ROBOTICS COMPETITION’S 27 Year History, http://www.aerialroboticscompetition.org/pastmissions.php “Mission 7 took a monumental leap by requiring autonomous aerial robots to interact with and control autonomous ground robots. Teams were tasked with developing systems to herd ground robots out one end of an arena in the absence of 3D cues such as walls. The ground robots could only be interacted with by touch. A top touch would command a 45° clockwise turn and a blocking action would result in a 180° turn. To complicate matters, the ground robots do a 180° turn every 20 seconds and add up to 15 degrees of trajectory noise every 5 seconds. The ground robots also impact one another and quickly devolve into non-deterministic travel. In the midst of the arena were four obstacle robots to complicate navigation and obstacle avoidance. The aerial robots had to dynamically determine a best course of action to keep the ground robots from exiting on three of four sides of the arena. In the top performances, which were replicated multiple times, the Zhejiang University team showed that its autonomous aerial robot could track individual ground robots, redirect them in either 45° or 180° increments while at the same time staying within the arena boundaries and avoiding the mobile obstacles circulating within the arena.”

Introduction The World Robotics Sailing Championship (WRSC) and The International Robotic Sailing Conference (IRSC) is the world largest fully autonomous sailing robot event which is a spinoff competition from the Microtransat challenge, a trans Atlantic race for autonomous sailing robots. The competition is open to wind-powered unmanned surface vehicles up to 4 metres long. The conference provides researchers with the opportunity to present and exchange ideas on their work. The WRSC is intended to promote the development of autonomous wind propelled sailing robots, through a series of short distance races, navigation and autonomy challenges. Many teams who take part in the Microtransat (or who plan to) also attend the WRSC. The accompanying IRSC (International Robotic Sailing Conference) provides researchers working on problems related to autonomous sailing the chance to exchange ideas during a scientific conference. So far the WRSC has been through 12 years. WRSC will be organized in 4 challenges: fleet race, station keeping, area scanning and obstacle avoidance. You need to master robotic navigation, positioning, trajectory planning and other technologies to challenge them. Results • The 11th WRSC and IRSC was held in Sounthampton, UK. As first time participants, our team ZMART won the 3rd place of WRSC 2018 Micro-sailiboat class. • The 12th WRSC and IRSC was held in Ningbo, China. Our team ZMART won the 1st place of WRSC 2019.

IntroductionICRA’s RoboMaster challenge asks teams to use the same hardware to build one or a pair of these rovers. Instead of human pilots, these rovers must be fully autonomous. The AI challenge asks teams to build rovers that can sense the environment around themselves, navigate an arena, and engage in combat with the opposing team. Rovers will need to move around the battlefield, a five by eight meter space, launching projectiles and trying to avoid incoming hits. At the end of the match, the team that has scored the most hits on their opponents will be declared the winner. The grand prize winner will receive a $20,000 prize.Teams purchase hardware from RoboMaster and code their own autonomous systems. After signing up, teams must submit photos, videos, and documentation that track their progress. Teams that demonstrate their ability to design fully functioning and autonomous rover units will qualify for the competition.Results• Our team, ZMART won the 2nd place of DJI RoboMaster AI Challenge, with $15,000 prize.

Introduction International Aerial Robot Competition (IARC) was founded in 1991, promoted by Professor Robert from Georgia Institute of Technology, funded by the Association for Unmanned Vehicle Systems International (AUVSI), and held once a year. The tournament so far has been through 27 years, with seven generations of tasks completed, which are all highly intelligent technology competition tasks from automatic to autonomous control. IARC aims to advance UAV technology by setting challenging, practical and meaningful competition tasks. These tasks are almost impossible to accomplish when they are presented, yet the world will benefit when they are ultimately accomplished by aerial robots. Mission 7, “Air Shepherd Dog Action”, requires aerial robots rely entirely on their own indoor navigation and control technology to block and control 10 ground moving objects to designated areas of the competition venue, and to avoid collisions of four moving obstacles of different heights. Results • Our team, ZMART, representing Zhejiang University, won the champion of mission 7 of IARC, and become the seventh world champion after Stanford University, Carnegie Mellon University, Technische Universität Berlin, Georgia Institute of Technology, Massachusetts Institute of Technology and Tsinghua University. ZMART Performance video • ZMART 2017 Trailer – We need you • 2016 IARC Official Results • 2016 IARC Performance Collection – ZMART For more information, please refer to this link.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Introduction High-speed autonomous navigation with micro aerial vehicles (MAVs) operating in unknown dynamic environments requires the vehicles to be capable of quick replans to avoid potential obstacles. The high operating speed, the short sensing range and the unknown dynamic environments all leave strictly limited reaction time to make motion plans of high qualities. Developing reasonable navigation frameworks and fast motion planning algorithms is an essential part of it, especially for those lightweight multi-rotors with limited onboard sensing and computation capabilities. The projects under this topic focus on developing effective yet computation-friendly motion planning methods to enable safe and high-speed navigation of MAVs, considering constraints and sensing and control uncertainties. Related Researches: TGK-Planner: An Efficient Topology Guided Kinodynamic Planner for Autonomous Quadrotors, Hongkai Ye, Xin Zhou, Chao Xu, Jian Chu, Fei Gao, IEEE Robotics and Automation Letter (RA-L). [paper] [code] EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors, Xin Zhou, Zhepei Wang, Chao Xu, Fei Gao, IEEE Robotics and Automation Letter (RA-L with ICRA 2021 option). [paper] [code] Mapless-Planner: A Robust and Fast Planning Framework for Aggressive Autonomous Flight without Map Fusion, Jialin Ji, Zhepei Wang, Yingjian Wang, Chao Xu, Fei Gao, the International Conference on Robotics and Automation (ICRA 2021). [paper] EVA-Planner: Environmental Adaptive Quadrotor Planning, Lun Quan, Zhiwei Zhang, Chao Xu, Fei Gao, the International Conference on Robotics and Automation (ICRA 2021). [paper] [code] Video Links: TGK-Planner: https://www.bilibili.com/video/BV1gA411e7DH EGO-Planner: https://www.bilibili.com/video/BV1VC4y1t7F4 Mapless-Planner: https://www.bilibili.com/video/BV1mt4y1e7TS EVA-Planner: https://www.bilibili.com/video/BV1Zz4y1C7rt