
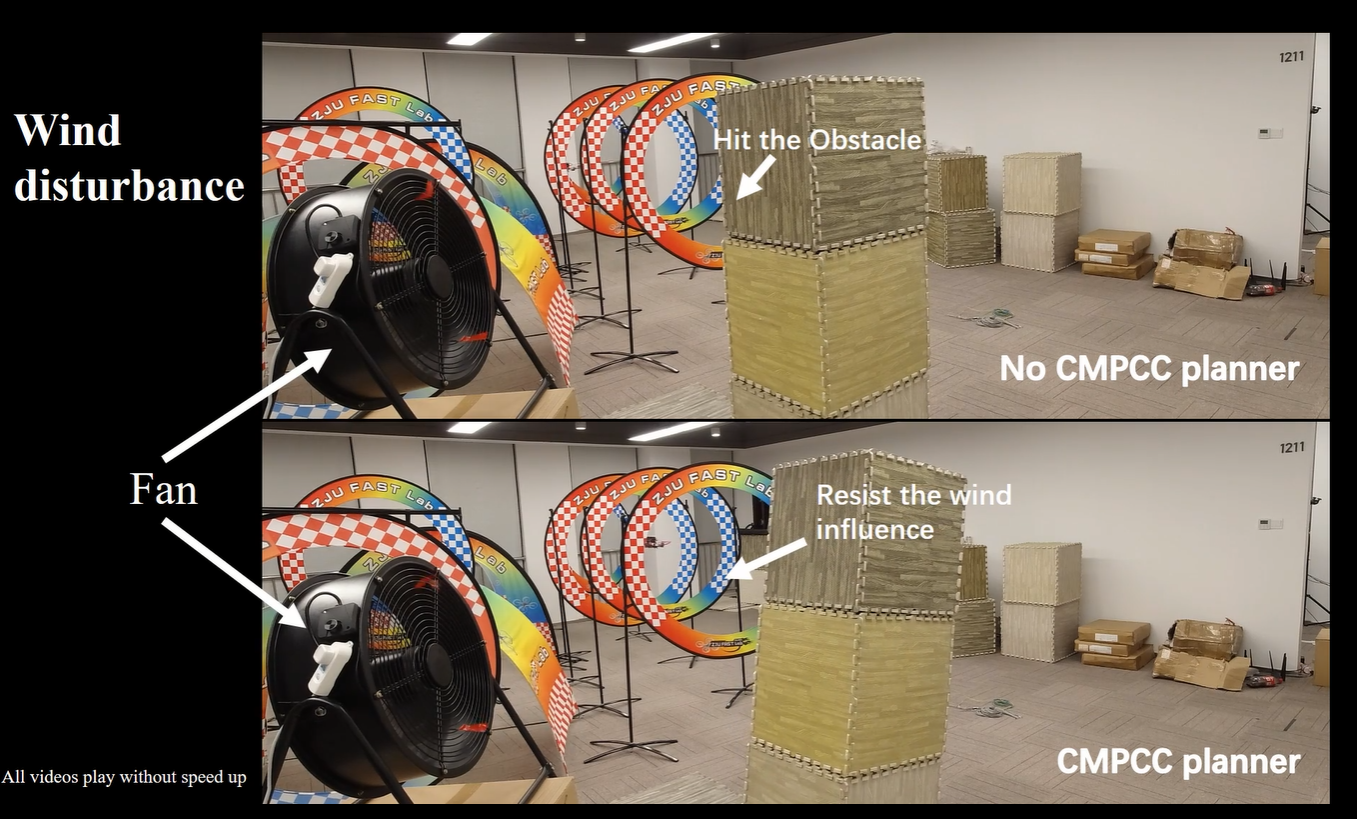
Introduction In recent years, the evolution of quadrotor online planning makes drones fly out of laboratories and appear in numerous real-world applications. In this area, traditional gradient-based planners rely on a pre-built ESDF map to evaluate the risk of collision. However, construction ESDF consumes significant computation. This project is an ESDF-free gradient-based local planning framework, and we incorporate careful engineering considerations to make it lightweight and robust. Among the criteria of designing autonomous quadrotors, generating optimized trajectories and tracking the flight paths precisely are two critical components in the action aspect. In industrial applications, the planner and controller of a quadrotor are mostly independently designed, making it hard to tune the joint performance in different applications. To bridge this gap, we propose an efficient, receding horizon, local adaptive low-level planner as the middle layer between our original planner and controller. Our method is named as corridor-based model predictive contouring control (CMPCC) since it builds upon on MPCC and utilizes the flight corridor as hard safety constraints. It optimizes the flight aggressiveness and tracking accuracy simultaneously, thus improving our system’s robustness by overcoming unmeasured disturbances. Our method features its online flight speed optimization, strict safety and feasibility, and realtime performance and it is released as a low-level plugin (https://github.com/ZJU-FAST-Lab/CMPCC) for a large variety of quadrotor systems. Related Research: CMPCC: Corridor based Model Predictive Contouring Control for Aggressive Drone Flight, Jialin Ji, Xin Zhou, Chao Xu, Fei Gao, International Symposium on Experimental Robotics (ISER 2020). [paper] [code]
ccxu
CMPCC is an efficient, receding horizon, local adaptive low-level planner as the middle layer between our original planner and controller trr. Author: Jialin Ji, Xin Zhou and Fei Gao from the ZJU Fast Lab. Related Paper: • CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Drone Flight, Jialin Ji, Xin Zhou, Chao Xu, Fei Gao, submitted to ISER. Video Links: youtube or bilibili
June 12th, 2020 Z. Wang, X. Zhou, C. Xu, Jian Chu, F. Gao’s work on “Alternating minimization based trajectory generation for quadrotor aggressive flight” has been accepted for publication in the IEEE Robotics and Automation Letters (RA-L). Videos: youtube or bilibili Code: https://github.com/ZJU-FAST-Lab/am_traj

{kind=link}
{kind=link}
Introduction We present systematic solutions to some aerial applications with the integration of our algorithmic researches, including state estimation, onboard mapping, optimal trajectory generation and robust control. Here we introduce the aerial agile tracking as an instance. In Fast-Tracker, we propose a systematic solution that uses an unmanned aerial vehicle (UAV) to aggressively and safely track an agile target. The solution properly handles the challenging situations where the intent of the target and the dense environments are unknown to the UAV. Our work is divided into two parts: target motion prediction and tracking trajectory planning. In the target motion prediction method, we adopt polynomial regression based on the past target observations. Especially, Bernstein basis polynomial is used to enforce dynamical constraints in the regression method. The generated trajectory is extrapolated as the prediction of target future motion. In the tracking trajectory planner, we design a heuristic function for the kinodynamic searching method that considers both the current target observation and motion prediction. Afterwards, a flight corridor that consists of a sequence of connected free-space 3-D grids is formed based on the results of the path searching. The back-end optimizer then generates a spatial-temporal optimal safe trajectory within the flight corridor. What’s more, due to the occlusion of obstacles, the limited sensing range, and the uncertainty of the target’s intent, it is hard for the UAV always to locate the target. We design a strategy so that the UAV can re-locate the target as soon as possible. The proposed solution is […]
AM-Traj is a C++11 header-only library for generating large-scale piecewise polynomial trajectories for aggressive autonomous flights, with highlights on its superior computational efficiency and simultaneous spatial-temporal optimality. Besides, an extremely fast feasibility checker is designed for various kinds of constraints. All components in this framework leverage the algebraic convenience of the polynomial trajectory optimization problem, thus our method is capable of computing a spatial-temporal optimal trajectory with 60 pieces within 5ms, i.e., 150Hz at least. You just need to include “am_traj.hpp” and “root_finder.hpp” in your code. Please use the up-to-date master branch which may have a better performance than the one in our paper. Author: Zhepei Wang and Fei Gao from the ZJU Fast Lab. Related Papers: • Alternating Minimization Based Trajectory Generation for Quadrotor Aggressive Flight, Zhepei Wang, Xin Zhou, Chao Xu, Jian Chu, and Fei Gao, submitted to RA-L/IROS 2020. • Detailed Proofs of Alternating Minimization Based Trajectory Generation for Quadrotor Aggressive Flight, Zhepei Wang, Xin Zhou, Chao Xu, and Fei Gao, the supplementary material. Video Links: youtube or bilibili
浙江大学控制科学与工程学院(下面简称控制学院)始建于1956年,建有控制科学与工程、网络空间安全(共建)2个一级学科,其中控制科学与工程学科1988年被确定为国家重点学科,2007年被批准为国家一级重点学科,是国家首批一级学科博士授予点;拥有“工业控制技术国家重点实验室”“工业自动化国家工程研究中心”“工业控制系统安全技术国家工程实验室”和“流程质量优化与控制国际联合研究中心”4个国家级平台和多个省部级基地;2017年,入选国家“双一流”学科建设名单,第四轮全国学科评估为“A+”。 无人系统与自主计算实验室(Field Autonomous Systems & compuTing)主要方向:1)智能无人系统;2)工业智能技术。现承担国家重点研发计划项目(科技部)、工业互联网创新发展工程项目(工信部)、基金项目(国家自然科学基金委)、国家电网项目、大疆(DJI)联合研发项目等;实验室与产业界合作密切、与国外同类顶尖实验室保持紧密合作关系;曾获国际空中机器人大赛冠军(2014年 – 2018年第七代任务)、DJI机甲大师全球人工智能挑战赛一等奖(2019年)、世界机器人帆船大赛总冠军(2019年)等荣誉。更多信息请访问:www.kivact.com。目前招聘博士后若干名,研究方向为 无人系统实时导航与控制(运动控制、视觉导航、轨迹规划等) 工业智能系统与信息处理(工业视觉、机器学习、控制系统等) 申请条件(应同时具备) 欢迎控制、应用数学、计算机、电子信息、电气、机械、航空航天等(但不限于以上)跨学科优秀博士毕业生联系申请。 具有良好师德师风,有较好的学术发展潜力和合作精神。 申请者一般应为毕业3年内的优秀博士毕业生,身体健康,年龄原则上不超过35周岁。 工作待遇 博士后年薪一般为15 – 30万,学院提供一定的科研启动经费。 博士后在站时间由学院、合作导师和博士后本人根据研究项目和内容需要在2 – 6年内灵活确定,在站期间可申请租住学校教师公寓,人事关系进入学校后从事博士后研究工作3年及以上的博士后,可按学校相关规定申报学校高级专业技术职务。 学校和学院鼓励博士后出站后积极应聘校内外专业技术岗位,并将博士后作为学校教学、科研、成果转化等岗位选聘的重要来源。 鼓励和支持博士后研究人员申报博士后国际交流计划、博士后科学基金以及其他国家与地方的科技项目和博士后资助项目。 材料(含简历、代表作)请寄wuwenjuan@zju.edu.cn,并注明“FAST-Lab Postdoc Application”,招满为止;咨询请联系cxu@zju.edu.cn(许超)、fgaoaa@zju.edu.cn(高飞)
ZJU was founded in 1897, which is one of the oldest and most prestigious institutions of higher education in China. It is considered a top university in the Chinese mainland, which is ranked #6 in Asia and #54 worldwide according to the QS University Rankings for 2020. The FAST Lab is the recipients of the Champion of the International Aerial Robotics Competition (2018), the First Prize of the DJI RoboMaster AI Global Challenges (2019), as well as the Champion of the World Robotic Sailing Competition (2019). The FACT Lab has a close collaborative relationship with industrial companies such as the Supcon and the DJI, etc. For more information about the FAST Lab, please visit www.kivact.com. The FAST Lab is calling for applications for several postdoc positions in the areas of unmanned systems (e.g., mechatronic control, autonomous navigation & planning) and industrial intelligence (e.g., industrial vision systems, machine learning and control systems). Successful applicants should hold a Ph.D. in the areas of engineering or science disciplines, such as control science & engineering, robotics, applied math, computing, electrical engineering, electronics, mechanical & aerospace engineering, but not limited to these. Application packages should send a CV and sample publications to wuwenjuan@zju.edu.cn entitled by “FAST Postdoc Application”. Positions remain open until filled. If you have any questions regarding the postdoc positions, please do not hesitate to contact cxu@zju.edu.cn (Chao Xu) and fgaoaa@zju.edu.cn (Fei Gao). The Chinese version is available on this page.
Chao Xu received a congratulatory letter from Ruben Barrera-Michel, Chair of IEEE Admission and Advancement Committee, mentioning that Chao Xu was elevated to the IEEE Senior member.
ZMART received an A rating in the technical solution evaluation of the 2020 Robomaster AI Challenge won an AI robot as a reward. For more information about RoboMater AI Challenge, please refer to this link.
F. Gao, L. Wang, B. Zhou, L. Han, J. Pan and S. Shen’s work on ‘Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments’ is conditionally accepted by IEEE Transactions on Robotics (T-RO). Introduction Teach-Repeat-Replan is a complete and robust system enables Autonomous Drone Race. It contains all components for UAV aggressive flight in complex environments. It is built upon the classical robotics teach-and-repeat framework, which is widely adopted in infrastructure inspection, aerial transportation, and search-and-rescue. Our system can capture users’ intention of a flight mission, convert an arbitrarily jerky teaching trajectory to a guaranteed smooth and safe repeating trajectory, and generate safe local re-plans to avoid unmapped or moving obstacles on the flight. Code: https://github.com/USTfgaoaa/Teach-Repeat-Replan/