转载自:https://mp.weixin.qq.com/s/iR1BpSMP9aPPWbDfVw5eIA
近日,我院无人系统与自主计算实验室(FAST Lab)高飞老师以第一兼通讯作者身份所发表工作“Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments”(以下简称TRR)获IEEE Transactions on Robotics (IEEE-TRO) 2020年度“傅京孙最佳论文荣誉奖”(King-Sun Fu Best Paper Award Honorable Mention)。这是中国大陆高校院所首次以第一完成单位获此殊荣,也是IEEE-TRO首次将此荣誉授予发表在IEEE-TRO上无人机领域的论文。
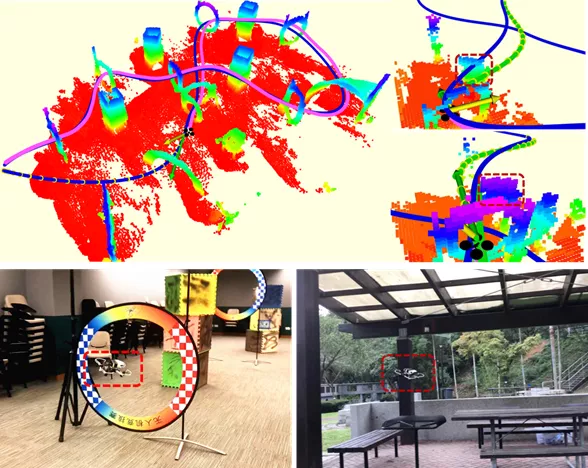
基于广泛应用于基础设施检查、空中运输、自主搜救等领域的经典“示教-复演”框架,该工作建立了一个完备且鲁棒的四旋翼无人机自主导航飞行系统。在经典“示教-复演”框架中,人类的意图对于决定无人机飞行轨迹的拓扑结构至关重要,然而用户输入的低效示教轨迹和不断变化的环境导致了“示教-复演”系统无法被灵活和稳健地应用。针对此问题,该研究首次提出无人机“示教-复演-重规划”概念,通过生成贴合环境障碍物的飞行走廊方式,生成平滑、安全、动力学可行并与示教路径拓扑等效的高质量飞行轨迹。同时,为了避免飞行过程中出现动态障碍物或定位飘移情况,该工作集成了快速局部感知和滑动窗口重规划方法,用于在线生成无人机局部避障轨迹。大量的室内外复杂场景实验结果,展现了该系统具备远超人类操作无人机水平的全自主无人机竞速性能。
截至消息发布前,该工作位列IEEE-TRO全数据库50大热门文章(排第14),并受到了国内外知名学者的广泛关注和高度评价。IEEE Transactions on Robotics总主编、美国西北大学教授Kevin Lynch(IEEE Fellow、Modern Robotics等著名机器人学教材作者)在授予该论文最佳论文荣誉奖时评价:“该工作在理论和实验上的贡献给IEEE-TRO编委会留下了深刻的印象(原文:‘The T-RO editorial board was impressed by the theoretical and experimental contributions of your work.’)。”
IEEE-TRO是IEEE旗下的机器人领域TOP期刊,包含了机器人领域各方面的研究。IEEE-TRO对论文质量有着极高的要求,需要工作对机器人领域有着显著卓越的理论、实践贡献并能推动领域发展,而“傅京孙最佳论文荣誉奖”用以表彰每年IEEE-TRO发表论文中的最佳工作。因此,能在IEEE-TRO期刊上发表论文并同时获得“傅京孙最佳论文荣誉奖”是所有机器人相关领域工作者的极高荣誉。
相关链接
● 论文官网链接
https://ieeexplore.ieee.org/document/9102390
● 工作开源链接
https://github.com/HKUST-Aerial-Robotics/Teach-Repeat-Replan
● 工作视频链接
https://www.bilibili.com/video/BV1Fx411o78w?from=search&seid=4539658003138370390
● FAST实验室链接