Author Zhepei Wang, Xin Zhou, Chao Xu and Fei Gao
Source code (to be released) of the proposed framework: https://github.com/ZJU-FAST-Lab/GCOPTER
Task-specified Experiments and Simulations:
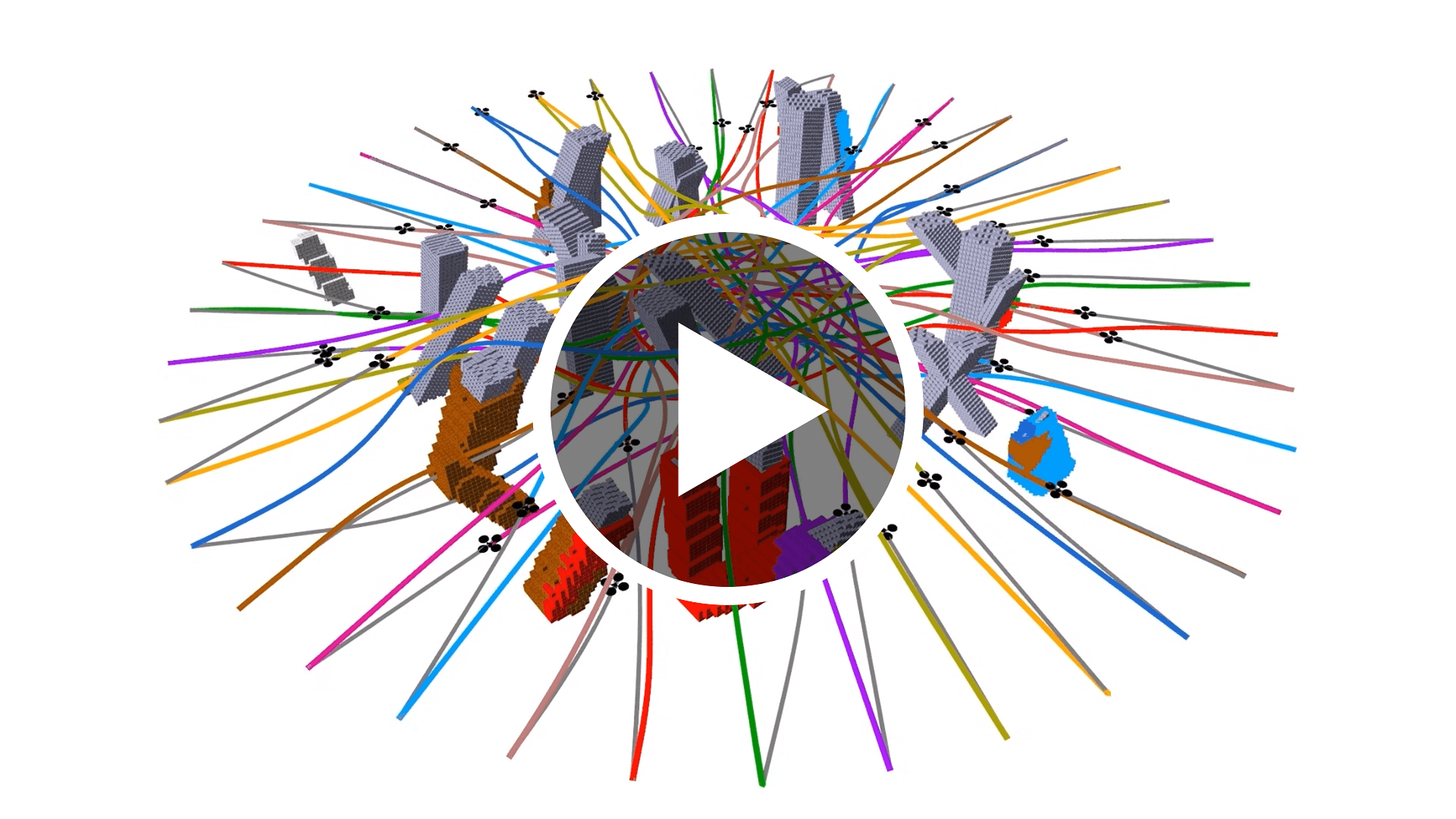
1. Robust Real-Time SE(3) Planning: youtube or bilibili. (Reported by IEEE Spectrum Website!)

2. Multicopter Swarms Planning: youtube or bilibili. (Also Reported by IEEE Spectrum Website!)
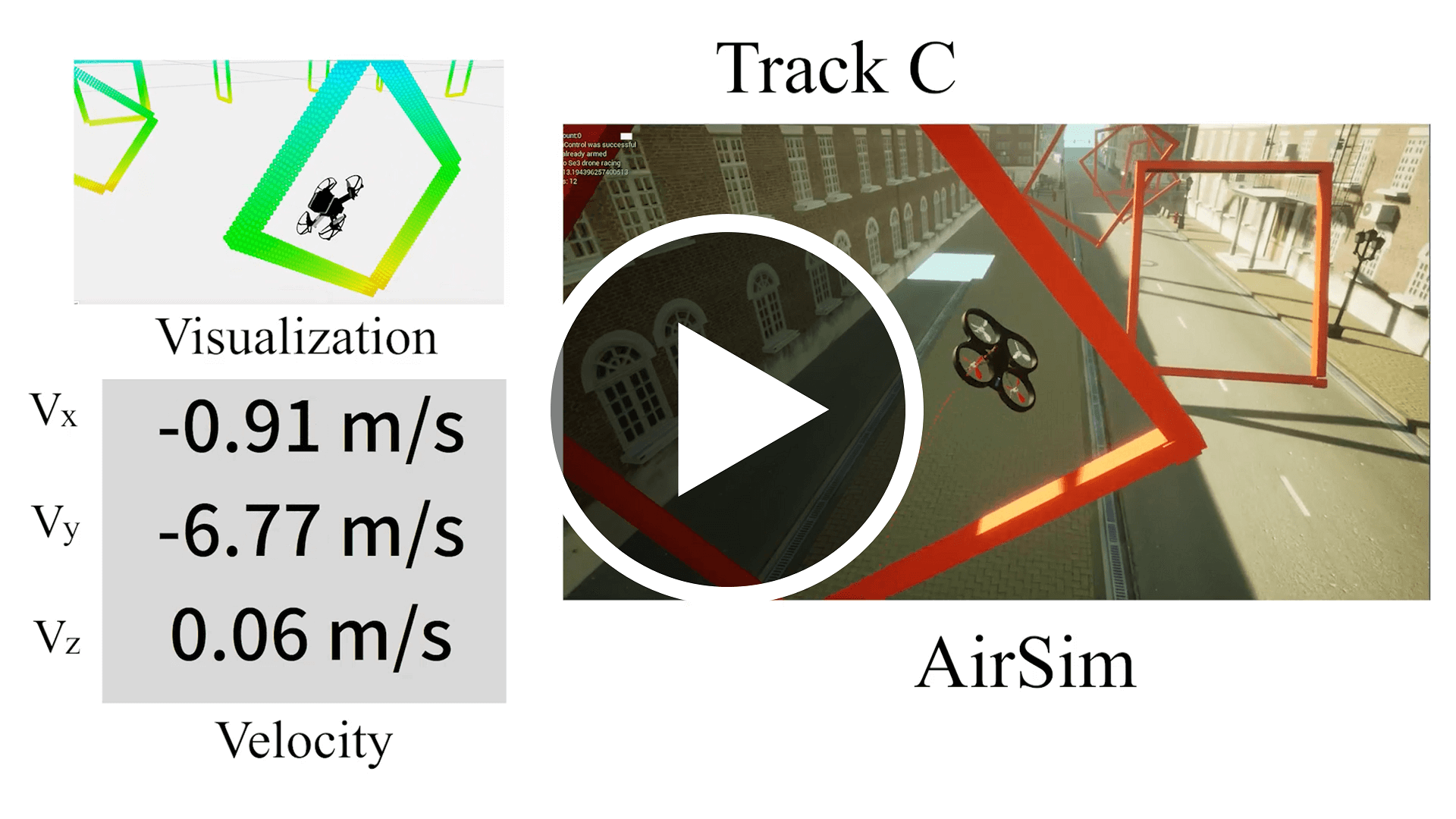
3. Long-Distance Drone Racing Planning: youtube or bilibili. (Published in IEEE RA-L)
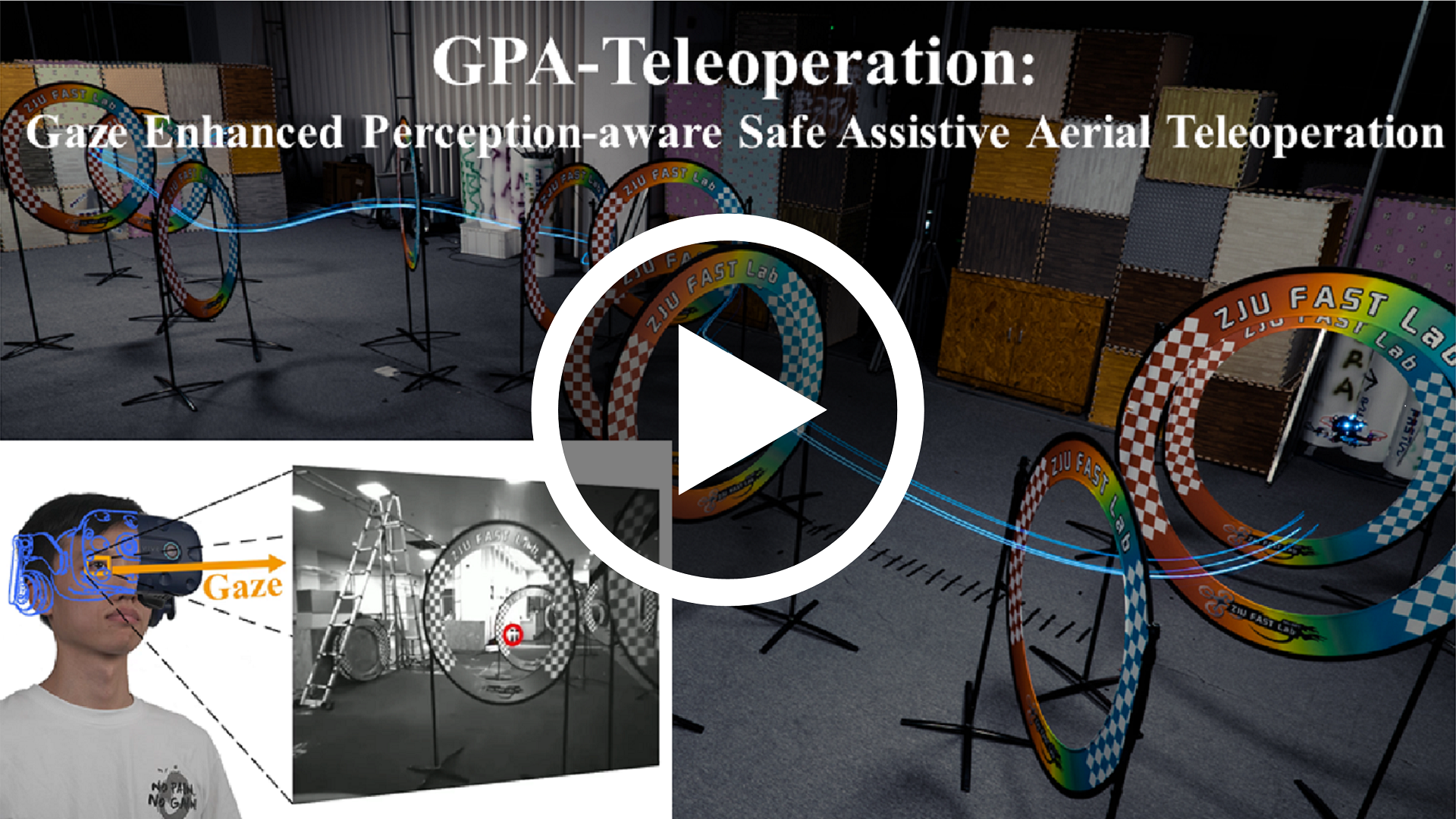
4. Gaze Teleoperation Planning: youtube or bilibili.
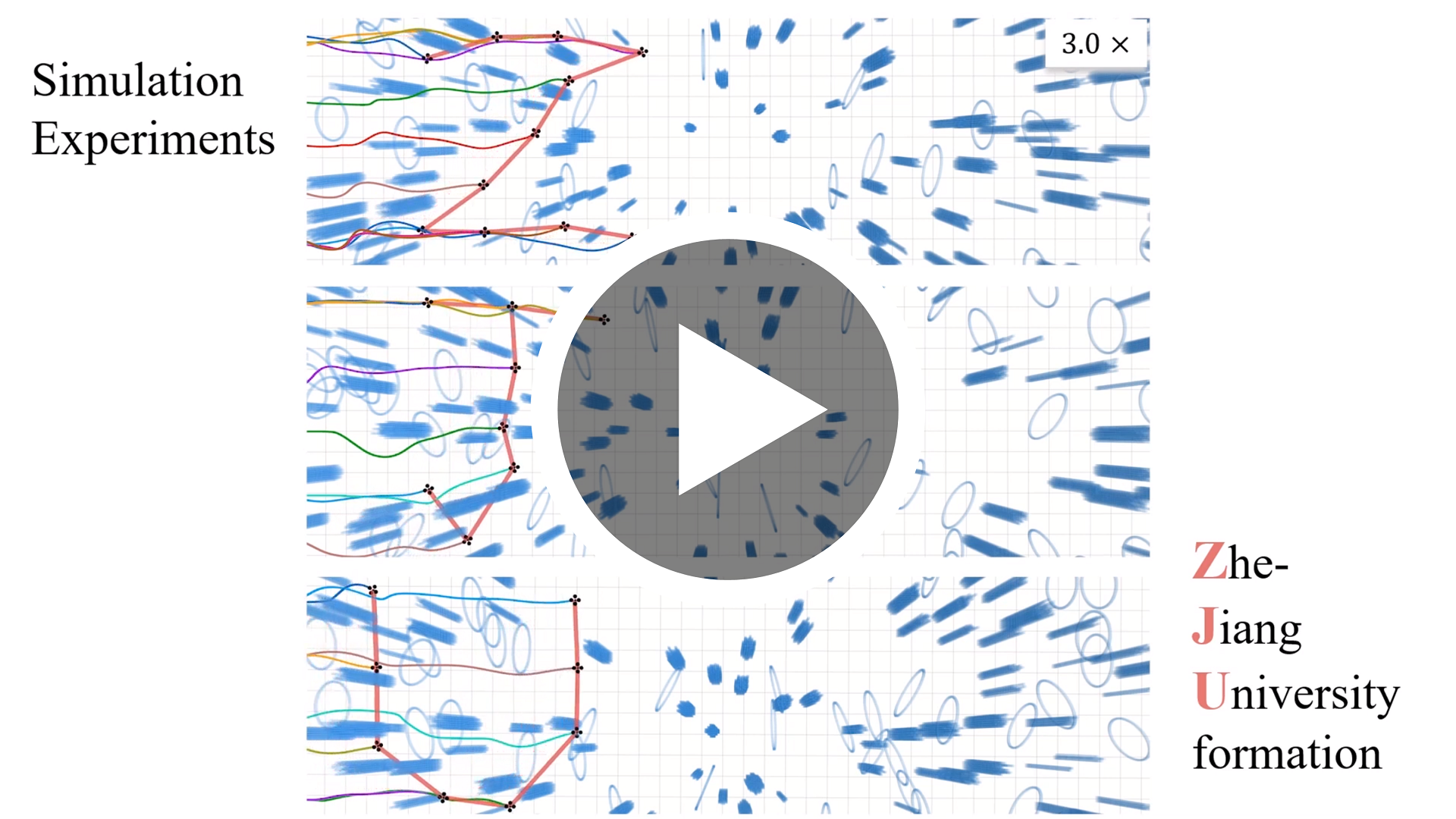
5. Formation Keeping Planning: youtube or bilibili.
6. A variety of applications powered by GCOPTER or MINCO are not listed here, such as: visibility-aware aerial tracking or planning with nonlinear drag effects.