
转载自:https://mp.weixin.qq.com/s/iR1BpSMP9aPPWbDfVw5eIA 近日,我院无人系统与自主计算实验室(FAST Lab)高飞老师以第一兼通讯作者身份所发表工作“Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments”(以下简称TRR)获IEEE Transactions on Robotics (IEEE-TRO) 2020年度“傅京孙最佳论文荣誉奖”(King-Sun Fu Best Paper Award Honorable Mention)。这是中国大陆高校院所首次以第一完成单位获此殊荣,也是IEEE-TRO首次将此荣誉授予发表在IEEE-TRO上无人机领域的论文。 基于广泛应用于基础设施检查、空中运输、自主搜救等领域的经典“示教-复演”框架,该工作建立了一个完备且鲁棒的四旋翼无人机自主导航飞行系统。在经典“示教-复演”框架中,人类的意图对于决定无人机飞行轨迹的拓扑结构至关重要,然而用户输入的低效示教轨迹和不断变化的环境导致了“示教-复演”系统无法被灵活和稳健地应用。针对此问题,该研究首次提出无人机“示教-复演-重规划”概念,通过生成贴合环境障碍物的飞行走廊方式,生成平滑、安全、动力学可行并与示教路径拓扑等效的高质量飞行轨迹。同时,为了避免飞行过程中出现动态障碍物或定位飘移情况,该工作集成了快速局部感知和滑动窗口重规划方法,用于在线生成无人机局部避障轨迹。大量的室内外复杂场景实验结果,展现了该系统具备远超人类操作无人机水平的全自主无人机竞速性能。 截至消息发布前,该工作位列IEEE-TRO全数据库50大热门文章(排第14),并受到了国内外知名学者的广泛关注和高度评价。IEEE Transactions on Robotics总主编、美国西北大学教授Kevin Lynch(IEEE Fellow、Modern Robotics等著名机器人学教材作者)在授予该论文最佳论文荣誉奖时评价:“该工作在理论和实验上的贡献给IEEE-TRO编委会留下了深刻的印象(原文:‘The T-RO editorial board was impressed by the theoretical and experimental contributions of your work.’)。” IEEE-TRO是IEEE旗下的机器人领域TOP期刊,包含了机器人领域各方面的研究。IEEE-TRO对论文质量有着极高的要求,需要工作对机器人领域有着显著卓越的理论、实践贡献并能推动领域发展,而“傅京孙最佳论文荣誉奖”用以表彰每年IEEE-TRO发表论文中的最佳工作。因此,能在IEEE-TRO期刊上发表论文并同时获得“傅京孙最佳论文荣誉奖”是所有机器人相关领域工作者的极高荣誉。 相关链接 ● 论文官网链接 https://ieeexplore.ieee.org/document/9102390 ● 工作开源链接 https://github.com/HKUST-Aerial-Robotics/Teach-Repeat-Replan ● 工作视频链接 https://www.bilibili.com/video/BV1Fx411o78w?from=search&seid=4539658003138370390 ● FAST实验室链接 http://zju-fast.com
News
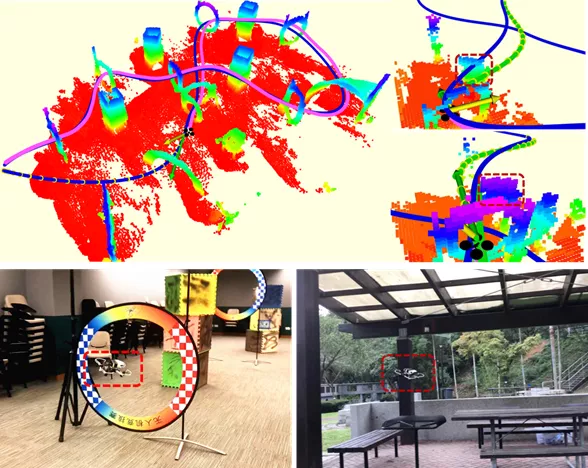
April 17th, 2021 F. Gao, L. Wang, B. Zhou, X. Zhou, J. Pan and S. Shen’s paper “Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments” received the IEEE T-RO 2020 King-Sun Fu Memorial Best Paper Award Honorable Mention.
February 28th, 2021 Seven conference papers are accepted by ICRA 2021: VID-Fusion: Robust Visual-Inertial-Dynamics Odometry for Accurate External Force Estimation, Ziming Ding, Tiankai Yang, Kunyi Zhang, Chao Xu, Fei Gao. EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments, Xin Zhou, Jiangchao Zhu, Hongyu Zhou, Chao Xu, Fei Gao. Fast-Tracker: A Robust Aerial System for Tracking Agile Target in Cluttered Environments, Zhichao Han, Ruibin Zhang, Neng Pan, Chao Xu, Fei Gao. Mapless-Planner: A Robust and Fast Planning Framework for Aggressive Autonomous Flight without Map Fusion, Jialin Ji, Zhepei Wang, Yingjian Wang, Chao Xu, Fei Gao. EVA-Planner: Environmental Adaptive Quadrotor Planning, Lun Quan, Zhiwei Zhang, Chao Xu, Fei Gao. Generating Large-Scale Trajectories Efficiently using Double Descriptions of Polynomials, Zhepei Wang, Hongkai Ye, Chao Xu, Fei Gao. Whole-Body Real-Time Motion Planning for Multicopters, Shaohui Yang, Botao He, Zhepei Wang, Chao Xu, Fei, Gao. ICRA 2021 will be held in Xi’an, China from May 30th to June 5th.

{kind=link}
December 17th, 2020 Our recent work “EGO-Swarm” is reported by Science. EGO-Swarm is a decentralized and asynchronous systematic solution for multi-robot autonomous navigation in unknown obstacle-rich scenes using merely onboard resources. Author: Xin Zhou, Jiangchao Zhu, Hongyu Zhou, Chao Xu, and Fei Gao from the ZJU Fast Lab. Related Paper: EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments (Submitted to ICRA2021). [Preprint] Video Links: YouTube, bilibili (for Mainland China)
December 16th, 2020 Hongkai Ye, Xin Zhou, Chao Xu, Jian Chu, Fei Gao’s work on “TGK-Planner: An Efficient Topology Guided Kinodynamic Planner for Autonomous Quadrotors” is accepted by IEEE Robotics and Automation Letters (RA-L) for publication.
October 21st, 2020 Xin Zhou, Zhepei Wang, Chao Xu and Fei Gao’s work on “EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors” is accepted by IEEE Robotics and Automation Letters (RA-L) for publication.
October 7th, 2020 Jialin Ji, Xin Zhou, Chao Xu, Fei Gao’s work on “CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Drone Flight” is accepted by International Symposium on Experimental Robotics (ISER) for publication. ISER 2020 will be held in La Valletta, Malta from March 22nd to 25th in 2021 due to travel restrictions after the CoVid-19 pandemic.
CMPCC is an efficient, receding horizon, local adaptive low-level planner as the middle layer between our original planner and controller trr. Author: Jialin Ji, Xin Zhou and Fei Gao from the ZJU Fast Lab. Related Paper: • CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Drone Flight, Jialin Ji, Xin Zhou, Chao Xu, Fei Gao, submitted to ISER. Video Links: youtube or bilibili
June 12th, 2020 Z. Wang, X. Zhou, C. Xu, Jian Chu, F. Gao’s work on “Alternating minimization based trajectory generation for quadrotor aggressive flight” has been accepted for publication in the IEEE Robotics and Automation Letters (RA-L). Videos: youtube or bilibili Code: https://github.com/ZJU-FAST-Lab/am_traj
AM-Traj is a C++11 header-only library for generating large-scale piecewise polynomial trajectories for aggressive autonomous flights, with highlights on its superior computational efficiency and simultaneous spatial-temporal optimality. Besides, an extremely fast feasibility checker is designed for various kinds of constraints. All components in this framework leverage the algebraic convenience of the polynomial trajectory optimization problem, thus our method is capable of computing a spatial-temporal optimal trajectory with 60 pieces within 5ms, i.e., 150Hz at least. You just need to include “am_traj.hpp” and “root_finder.hpp” in your code. Please use the up-to-date master branch which may have a better performance than the one in our paper. Author: Zhepei Wang and Fei Gao from the ZJU Fast Lab. Related Papers: • Alternating Minimization Based Trajectory Generation for Quadrotor Aggressive Flight, Zhepei Wang, Xin Zhou, Chao Xu, Jian Chu, and Fei Gao, submitted to RA-L/IROS 2020. • Detailed Proofs of Alternating Minimization Based Trajectory Generation for Quadrotor Aggressive Flight, Zhepei Wang, Xin Zhou, Chao Xu, and Fei Gao, the supplementary material. Video Links: youtube or bilibili